AI + Robots + Humans
[Our website is in Beta]
The Collaborative, Learning, and Adaptive Robots (CLeAR) Lab at NUS investigates the science and engineering of human-AI/robot teams. We conduct human-robot-interaction (HRI) experiments and develop novel machine-learning (ML) methods that enable robots to work with people; we’re particularly interested in trustworthy collaborative robots.


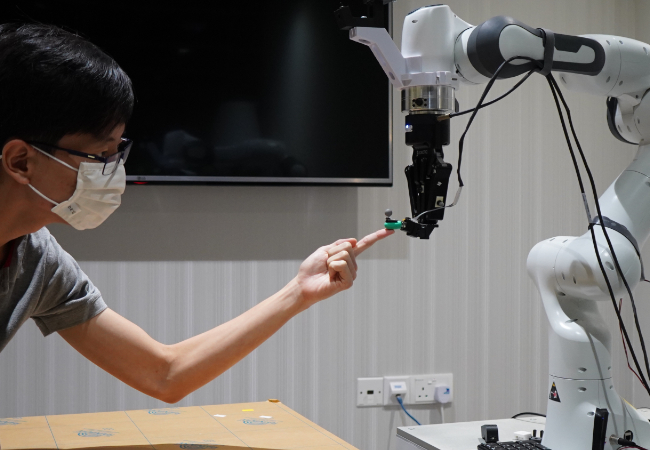
We are interested in both cognitive and physical aspects of human-robot interaction. For example, we’ve developed new machine-learning (ML) models of human trust and enabled robots to identify objects by touch. As part of our research, we also develop general-purpose ML methods for integrating prior knowledge into deep-learning and new generative models.
For more information, please check out our recent publications or get in touch.
Latest News
10 Apr 2021
Harold was awarded a Faculty Teaching Excellence Award for 2019/20! (Third year in a row).
01 Mar 2021
Our work on Embedding Symbolic Temporal Knowledge into Deep Sequential Models by Yaqi was just accepted to ICRA 2021!
01 Mar 2021
Our work on Multi-Modal Mutual Information (MuMMI) Training for Robust Self-Supervised Deep Reinforcement Learning by Kaiqi and Yong Lee was just accepted to ICRA 2021!
15 Jan 2021
Our work on refining generative models by Fatir and Ming Liang was just accepted to ICLR 2021!
14 Jan 2021
Our Late-Breaking Report on a new Theory for Large-Scale HRI will appear at HRI 2021!
25 Sep 2020
Our paper on Efficient Exploration of Reward Functions in Inverse Reinforcement Learning via Bayesian Optimization was just accepted to Neurips 2020!
07 Sep 2020
Our review paper on Trust in Robots has just been published in Current Robotics Reports. Congratulations to Bingcai on the paper!
04 Aug 2020
Congratulations to Tasbolat who has just won a Research Achievement Award!
01 Jul 2020
Congratulations to Eugene Lim who won the NUS Outstanding Undergraduate Research Award for his work on deep models for collaboration and Juiced!
30 Jun 2020
Our paper Capability, Intent and Trust Calibration in Human Collaboration by Joshua, Jeffrey and Bingcai was just accepted at IROS 2020!