@article{kok20trust,
title={Trust in Robots: Challenges and Opportunities},
author={Bing Cai Kok and and Harold Soh},
journal={Current Robotics Reports},
year={2020},
doi={10.1007/s43154-020-00029-y}}
Trust in Robots
Trust is crucial in shaping human interactions with one another and with robots. We are currently exploring how humans develop trust in robots and how we can use predictive models of trust to enable better human-robot collaboration. Below, you’ll find some of our recent published papers on understanding how humans trust robots in uncertain scenarios, computational trust modeling, and using trust models in robot decision-making.
★ CLeAR Group Members
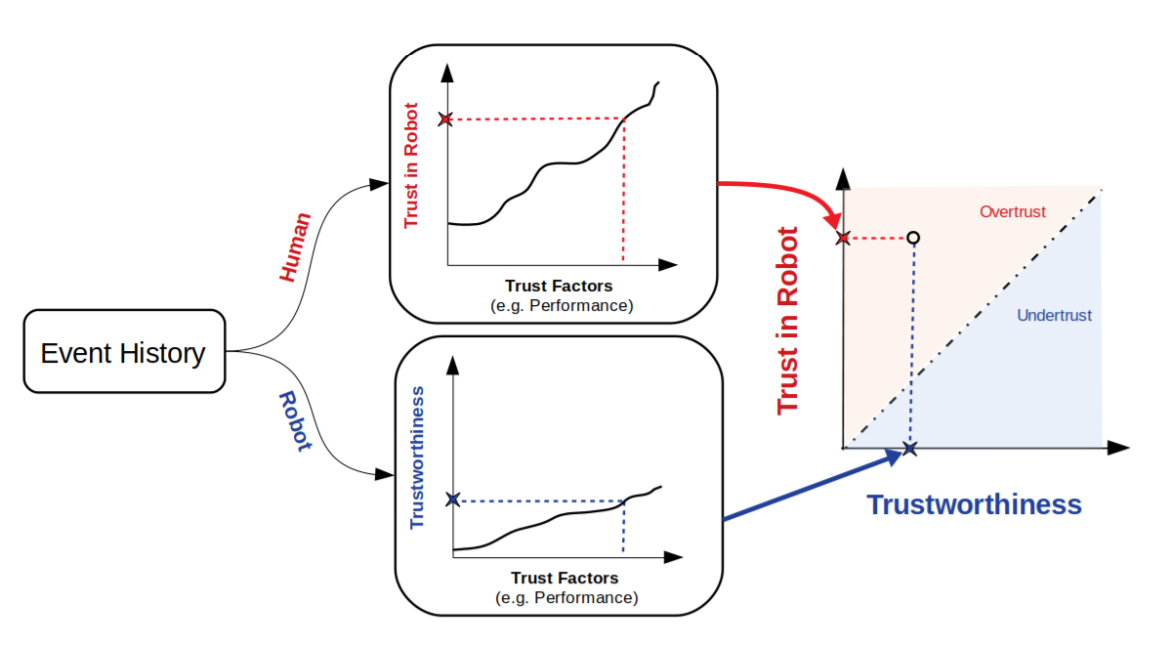
Trust in Robots: Challenges and Opportunities
[PDF]
Bing Cai Kok★, and Harold Soh ★
Current Robotics Reports, 2020
TL;DR: What's new in human-robot trust? We review the state-of-the-art and connect the field to recent results in (deep) learning and trustworthy AI.
-
More Links:
[Publisher Link]
[BibTeX]
Getting to Know One Another: Calibrating Intent, Capabilities and Trust for Human-Robot Collaboration
[PDF]
Joshua Lee★, Jeffrey Fong★, Bing Cai Kok★, and Harold Soh ★
IEEE/RSJ International Conference on Robots and Systems (IROS), 2020
TL;DR: We propose how a robot and a human can learn to adapt to each other when intention and capabilities are initially unknown.
-
More Links:
[Github]
[BibTeX]
@inproceedings{lee2020trust,
title={Getting to Know One Another: Calibrating Intent, Capabilities and Trust for Human-Robot Collaboration},
author={Joshua Lee and Jeffrey Fong and Bing Cai Kok and and Harold Soh},
booktitle = {IEEE/RSJ International Conference on Intelligent Robots and Systems},
year = {2020},
month = {October}}
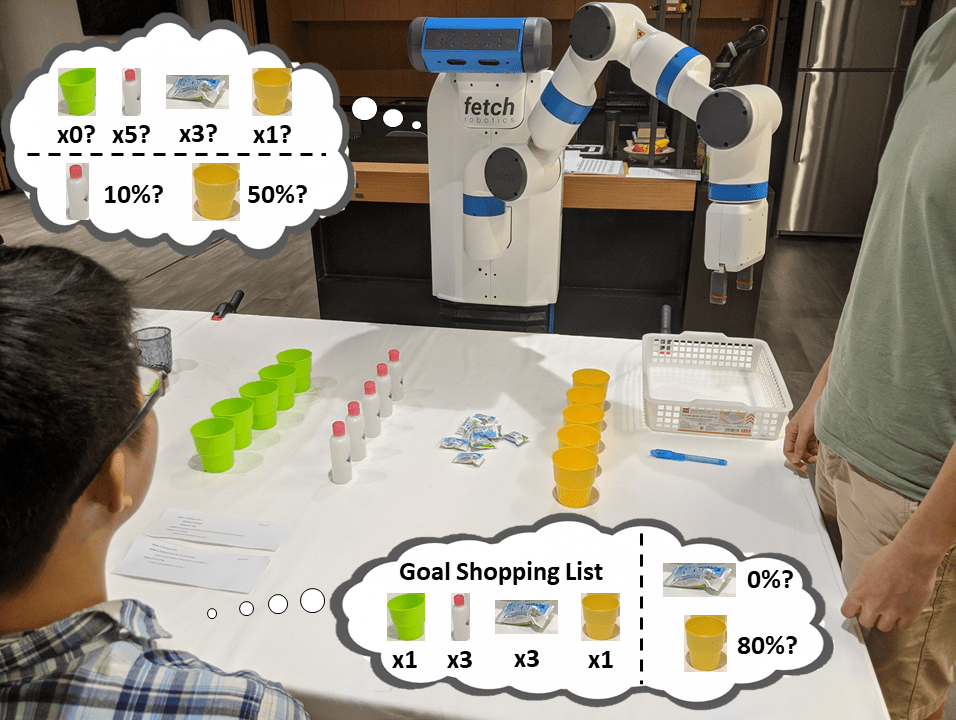
Multi-Task Trust Transfer for Human Robot Interaction
[PDF]
[Blog]
Harold Soh ★, Yaqi Xie★, Min Chen, and David Hsu
International Journal of Robotics Research (IJRR), 2020
TL;DR: Journal version of our RSS paper on trust transfer. Extensions include a new Hybrid model that combines the Bayesian and Neural trust-transfer models.
-
More Links:
[Publisher Link]
[BibTeX]
@article{soh2019multi,
title={Multi-task trust transfer for human--robot interaction},
author={Soh, Harold and Xie, Yaqi and Chen, Min and Hsu, David},
journal={The International Journal of Robotics Research},
volume = {39},
number = {2-3},
pages = {233-249},
year = {2020},
doi = {10.1177/0278364919866905},
publisher={SAGE Publications Sage UK: London, England}}

Trust-Aware Decision Making for Human-Robot Collaboration: Model Learning and Planning
[PDF]
Min Chen, Stefanos Nikolaidis, Harold Soh ★, David Hsu, and Siddhartha Srinivasa
ACM Transactions on Human Robot Interaction (THRI), 2020
TL;DR: We incorporate human trust into planning, which leads to performance gains in collaborative settings.
-
More Links:
[Publisher Link]
[BibTeX]
@article{10.1145/3359616, author = {Chen, Min and Nikolaidis, Stefanos and Soh, Harold and Hsu, David and Srinivasa,
Siddhartha},
title = {Trust-Aware Decision Making for Human-Robot Collaboration: Model Learning and Planning},
year = {2020},
issue_date = {February 2020},
publisher = {Association for Computing Machinery},
address = {New York, NY, USA},
volume = {9},
number = {2},
url = {https://doi.org/10.1145/3359616},
doi = {10.1145/3359616},
journal = {J. Hum.-Robot Interact.},
month = jan,
articleno = {Article 9},
numpages = {23}}
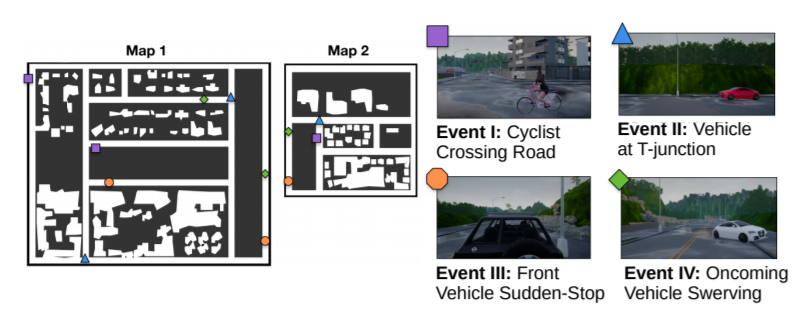
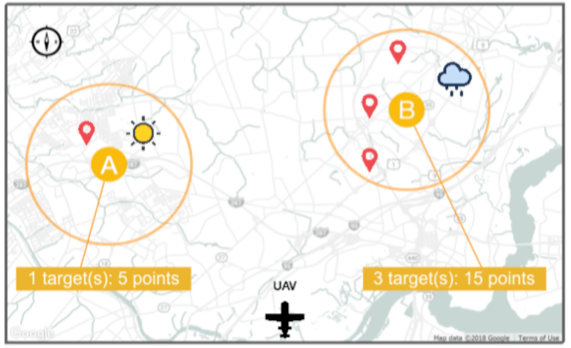
Modeling the Interplay of Trust and Attention in HRI: an Autonomous Vehicle Study
[PDF]
Indu Prasad Bodala★, Bing Cai Kok★, Weicong Sng★, and Harold Soh ★
Late Breaking Report, ACM/IEEE Conference on Human Robot Interaction (HRI), 2020
TL;DR: We develop a probabilistic model that relates trust and attention in autonomous driving scenarios.
-
More Links:
[BibTeX]
@inproceedings{bodala2020modeling,
title={Modeling the Interplay of Trust and Attention in HRI: An Autonomous Vehicle Study},
author={Bodala, Indu P and Kok, Bing Cai and Sng, Weicong and Soh, Harold},
booktitle={Companion of the 2020 ACM/IEEE International Conference on Human-Robot Interaction},
pages={145--147},
year={2020}}
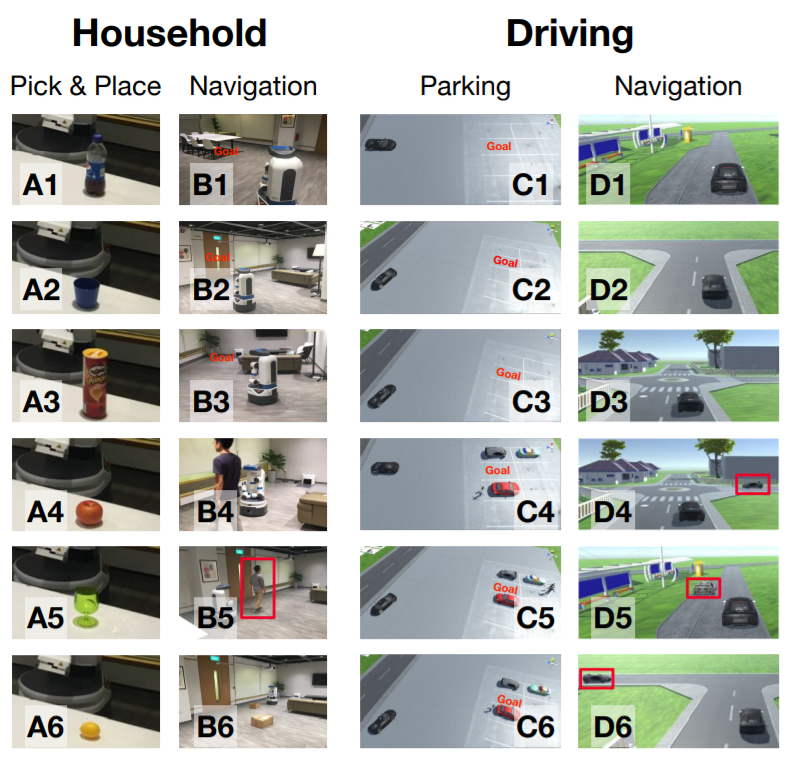
Robot Capability and Intention in Trust-based Decisions across Tasks
[PDF]
Xie Yaqi★, Indu Prasad★, Desmond Ong, David Hsu and Harold Soh ★
ACM/IEEE Conference on Human Robot Interaction (HRI), 2019
TL;DR: When deciding to trust a robot, humans ask "Can this robot do what I want?" (capability) and "Will it do it the way I want?" (intention)
-
More Links:
[BibTeX]
@inproceedings{xie2019robot,
title={Robot Capability and Intention in Trust-Based Decisions Across Tasks},
author={Xie, Yaqi and Bodala, Indu P and Ong, Desmond C and Hsu, David and Soh, Harold},
booktitle={2019 14th ACM/IEEE International Conference on Human-Robot Interaction (HRI)},
pages={39--47},
year={2019},
organization={IEEE}}
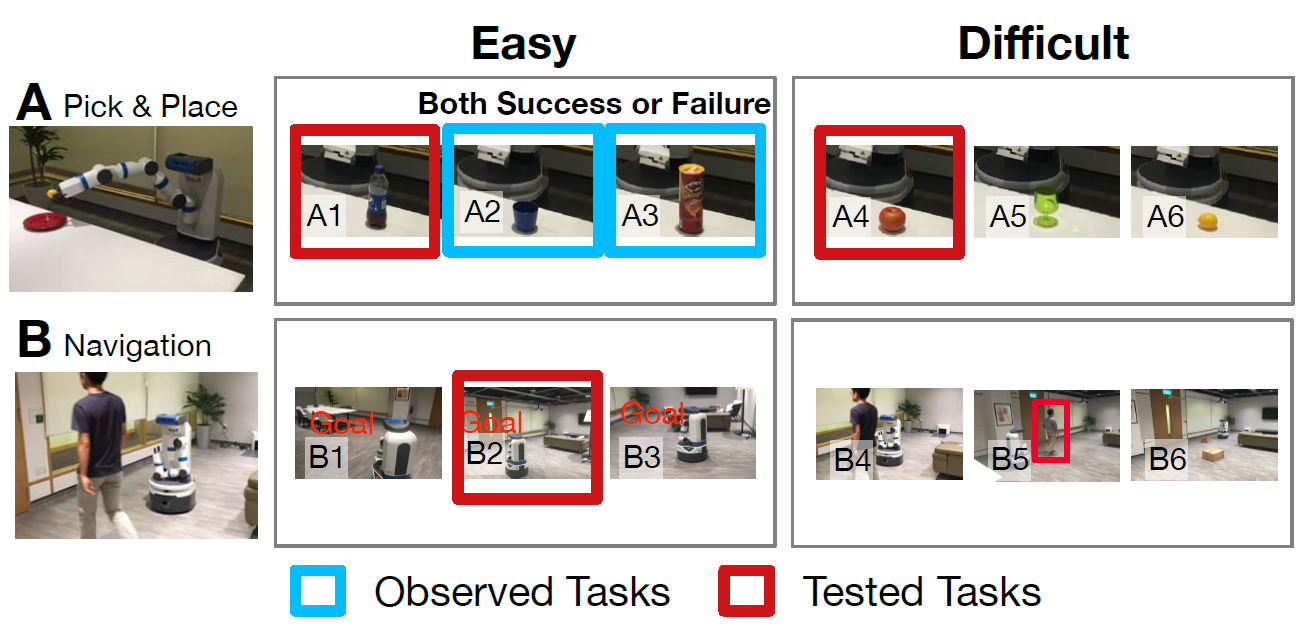
The Transfer of Human Trust in Robot Capabilities across Tasks
[PDF]
Harold Soh ★, Shu Pan★, Min Chen, and David Hsu
Robotics Science and Systems (RSS), 2018
TL;DR: We present the first Bayesian and Deep (neural) human trust models that can model and predict human trust across tasks.
-
More Links:
[Github]
[BibTeX]
@INPROCEEDINGS{Soh-RSS-18,
AUTHOR = {Harold Soh AND Shu Pan AND Chen Min AND David Hsu},
TITLE = {The Transfer of Human Trust in Robot Capabilities across Tasks},
BOOKTITLE = {Proceedings of Robotics: Science and Systems},
YEAR = {2018},
ADDRESS = {Pittsburgh, Pennsylvania},
MONTH = {June},
DOI = {10.15607/RSS.2018.XIV.033}}
Planning with Trust for Human Robot Collaboration
[PDF]
Min Chen, Stefanos Nikolaidis, Harold Soh ★, David Hsu, and Siddhartha Srinivasa
ACM/IEEE Conference on Human Robot Interaction (HRI), 2018
TL;DR: Incorporating human trust modeling into planning leads to better collaboration.
-
More Links:
[BibTeX]
@inproceedings{chen2018planning,
title={Planning with trust for human-robot collaboration},
author={Chen, Min and Nikolaidis, Stefanos and Soh, Harold and Hsu, David and Srinivasa, Siddhartha},
booktitle={Proceedings of the 2018 ACM/IEEE International Conference on Human-Robot Interaction},
pages={307--315},
year={2018},
organization={ACM}}
Human Trust in Robot Capabilities across Tasks
[PDF]
Pan Shu★, Min Chen, Stefanos Nikolaidis, David Hsu, and Harold Soh ★
Late Breaking Report, ACM/IEEE Conference on Human Robot Interaction (HRI), 2018
TL;DR: A late breaking report (work in progress) showing how human trust in robots varies across tasks.
-
More Links:
[BibTeX]
@inproceedings{Shu2018trust,
author = {Shu, Pan and Min, Chen and Bodala, Indu and Nikolaidis, Stefanos and Hsu, David and Soh, Harold},
title = {Human Trust in Robot Capabilities Across Tasks},
booktitle = {Companion of the 2018 ACM/IEEE International Conference on Human-Robot Interaction},
series = {HRI '18},
year = {2018},
isbn = {978-1-4503-5615-2},
location = {Chicago, IL, USA},
pages = {241--242},
numpages = {2},
url = {http://doi.acm.org/10.1145/3173386.3177034},
doi = {10.1145/3173386.3177034},
acmid = {3177034},
publisher = {ACM},
address = {New York, NY, USA},
keywords = {human robot interaction, trust},}